

YOLOv5
一、输入端分析
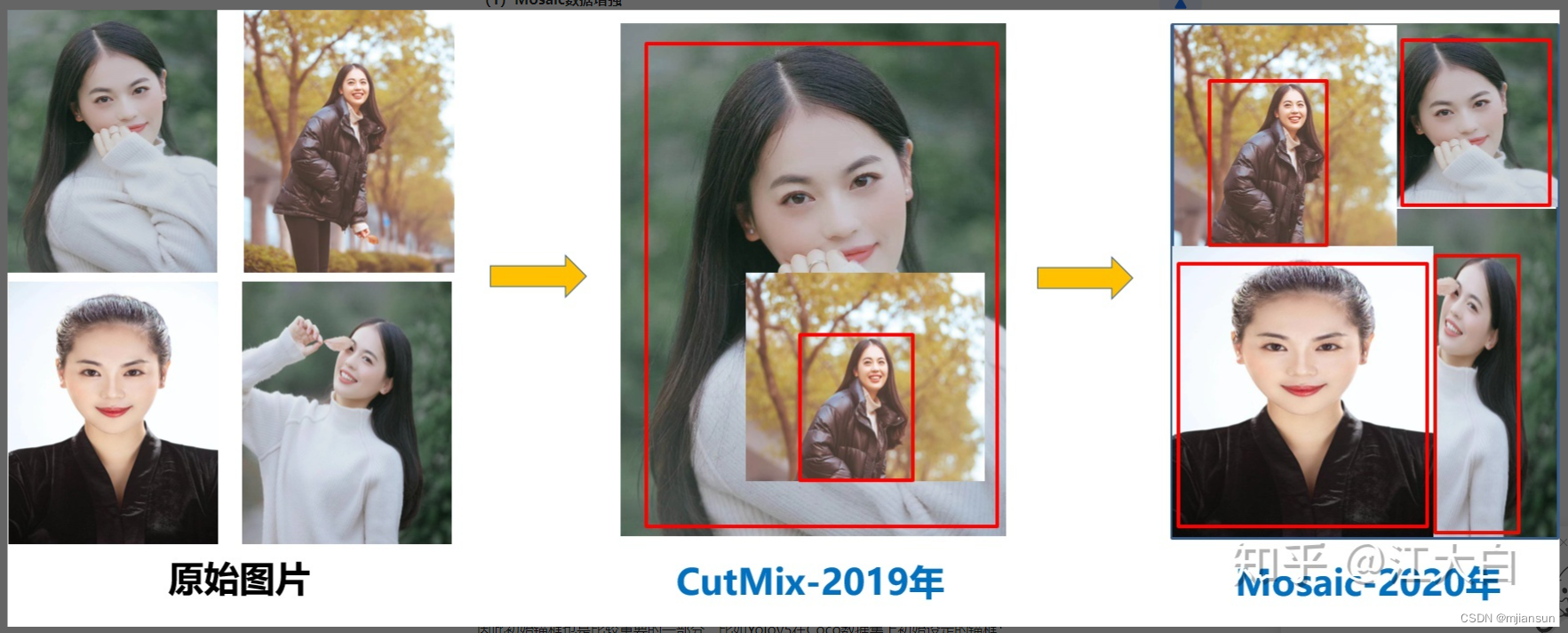
Mosaic数据增强
原理分析
YOLOv5采用和YOLOv4一样的Mosaic数据增强。
主要原理:它将一张选定的图片和随机的3张图片进行随机裁剪,再拼接到一张图上作为训练数据。
这样可以丰富图片的背景,而且四张图片拼接在一起变相提高了batch_size,在进行batch normalization(归一化)的时候也会计算四张图片。
这样让YOLOv5对本身batch_size不是很依赖。
代码分析
1、主体部分——load_mosaic
1 | labels4, segments4 = [], [] |
先初始化标注列表为空,然后获取图像尺寸s
根据图像尺寸利用random.uniform()随机生成mosaic中心点,范围在(即一半图像尺寸到1.5倍图像尺寸)
1 | indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices |
利用random.choices()随机生成另外3张图片的索引,将这4张图片的索引填进indices列表,然后利用random.shuffle()对这些索引值随机排序
1 | for i, index in enumerate(indices): #循环遍历这些图片 |
循环遍历这4张图片,并且调用load_image()函数加载图片和对应高宽
接下来就是如何放置这4张图啦~
1 | # place img in img4 |
第一张图片放在左上角
img4首先用np.full()函数填充初始化大图,尺寸是4张图那么大
然后分别设置大图上该图片的位置,以及相应的在原图(即小图)上截取的位置坐标
1 | elif i == 1: # top right(右上角) |
剩下3张如法炮制
1 | img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax] |
大图上贴上小图的对应部分
1 | padw = x1a - x1b |
计算小图到大图上时所产生的偏移,用来计算mosaic增强后的标签的位置
1 | # Labels |
对label标注进行初始化操作:
先读取对应图片的label,然后将xywh格式的label标准化为像素xy格式的。
segments转为像素段格式
然后统统填进之前准备的标注列表
1 | # Concat/clip labels |
先把label列表进行数组拼接,转化好格式,方便下面的处理,并且把数据截取在0到2倍图片尺寸
1 | # Augment |
进行mosaic的时候将四张图片整合到一起之后shape为[2img_size,2img_size]
并且对mosaic整合的图片进行随机旋转、平移、缩放、裁剪,并resize为输入大小img_size
1 | return img4, labels4 |
最后返回处理好的图片和相应的label
2、load_image函数
load_image函数:加载图片并根据设定的输入大小与图片原大小的比例ratio进行resize
首先获取该索引的图片
1 | def load_image(self, i): |
判断一下图片是否有缓存,即有没有缩放处理过(这里不太确定这样理解对不对,如果错了麻烦在评论区跟我说一下下,谢谢啦~)
如果没有:
先去对应文件夹中找
如果能找到:加载这张图片
如果找不到:读取这张图的路径,然后报错找不到对应路径的这张图片
读取这张图的原始高宽以及设定resize比例
如果这个比例不等于1,那我们就resize一下进行一个缩放
最后返回这张图片,原始高宽和缩放后的高宽
1 | if im is None: # not cached in ram |
如果有
那就直接返回这张图片,原始高宽和缩放后的高宽啦~
1 | else: |
3、random_perspective()函数(详见代码解析)
随机变换
计算方法:坐标向量和变换矩阵的乘积
首先获得加上边框后的图片高宽
1 | def random_perspective(im, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0, |
然后计算中心点
1 | # Center |
接下来是各种变换(旋转等等)的矩阵准备
1 | # Perspective |
然后是组合旋转矩阵
1 | # Combined rotation matrix |
然后是变换标签的坐标
1 | # Transform label coordinates |
最后是计算候选框并返回
1 | # filter candidates |
自适应锚框计算
YOLOv5针对不同的数据集,都有初始设定长宽的锚框。在训练过程中,在初始锚框的基础上输出预测框,然后和真实框groundtruth进行比对,即以真实的边框位置相对于预设边框的偏移来计算两者差距,再反向更新,迭代网络参数,继续训练。
Anchor Box的定义:由边框的高宽来描述,这样乍一看会觉得这个Anchor Box不是固定的呀,它能在图片上形成无数个。这里就需要一个中心点了,而这个中心点是由后续网络提取到的Feature Map 的点,所以一个初始Anchor box不需要指定中心位置。
在yolov5s.yaml文件中的初始化为:
1 | anchors: |
在YOLOv5中这个功能是可选的,如果你觉得它效果不好可以关了它,在训练代码时增加
“–noautoanchor”选项
具体选择在train.py文件中
1 | parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor') |
自适应图片缩放

1、原理分析
通常我们找到的图片尺寸都不一样,但是要进入网络训练时,需要保证图片尺寸一致。
但是如果我们简单的使用resize,就会造成图片的失真,进而影响我们的结果。
因此采取一种更好的方法——letterbox自适应图片缩放技术
注:train过程中并没有用到letterbox自适应图片缩放技术,只有在detect过程中使用。
train所保持的图片尺寸一致是因为它把4张图片的部分组成了一张尺寸一致的大图,因此不需要用到letterbox
letterbox自适应图片缩放技术尽量保持高宽比,缺的用灰边补齐达到固定的尺寸。
接下来我们与代码相结合来具体看看它的原理
2、代码分析
这部分在utils/augmentations.py文件中的letterbox函数
首先获得当前图片高宽,然后保证变换的图片高宽为整数
1 | def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32): |
计算缩放比例,取最小的那个比例,并且我们只缩小不放大
1 | r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])#计算缩放比例 |
然后计算填充的长宽:
首先计算按照比例缩放后的图片高宽
然后以此计算要填充的长度,再与stride相除取余数
其中stride表示模型下采样次数的2的次方,(感受野的问题)在YOLOV5中下采样次数为5,所以为32
最后填充长度减半,因为要分上和下,左和右
1 | # Compute padding |
变换并返回:
调用resize函数进行变形,然后最终确定上下左右要填充的数(保证是大于等于0的整数)
再调用copyMakeBorder填充
最终返回操作后的图片,缩放比例以及填充的高宽
1 | if shape[::-1] != new_unpad: # resize |
二、整体网络结构图以及总括介绍
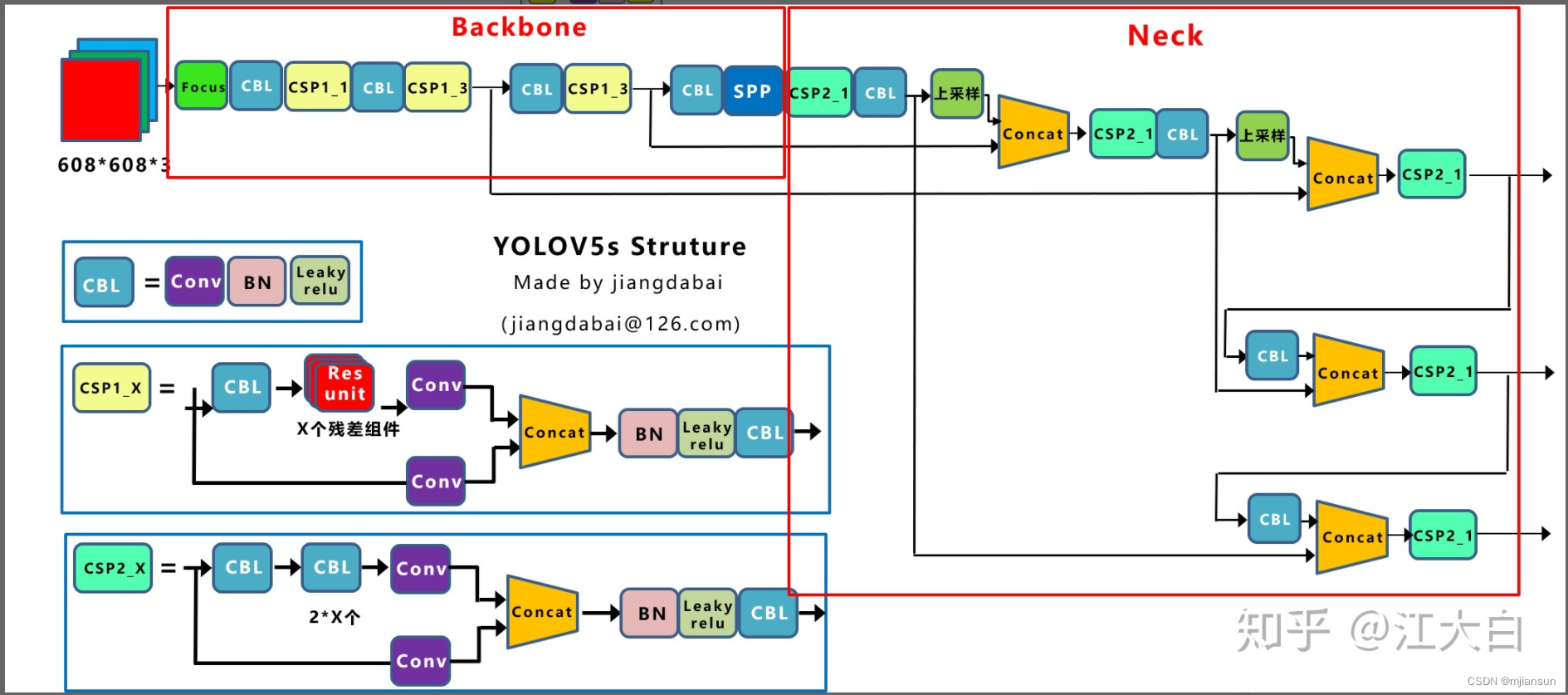
网络结构图如下图所示:
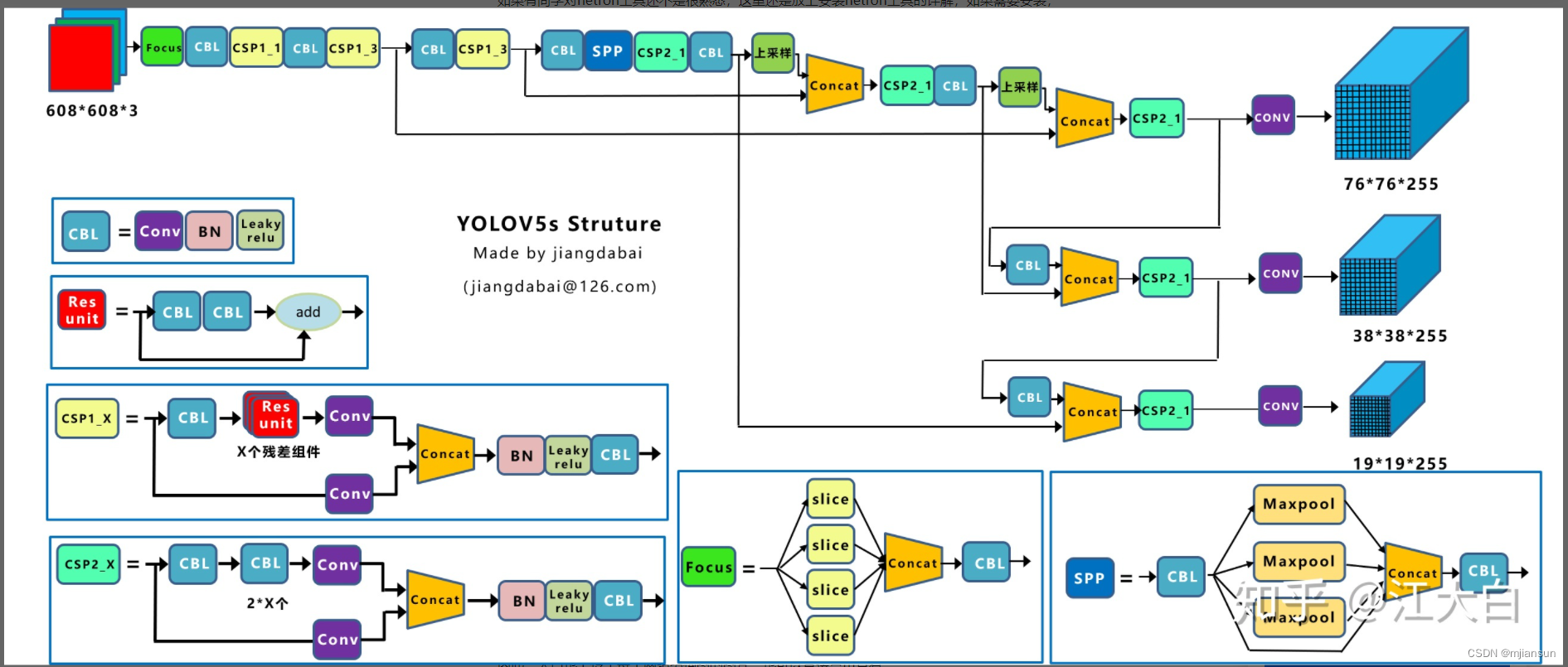
(其中CBL的标注都是有关输出的)
v5.0版本(下图中的CBL改为CBS)
Backbone
(1)Focus结构
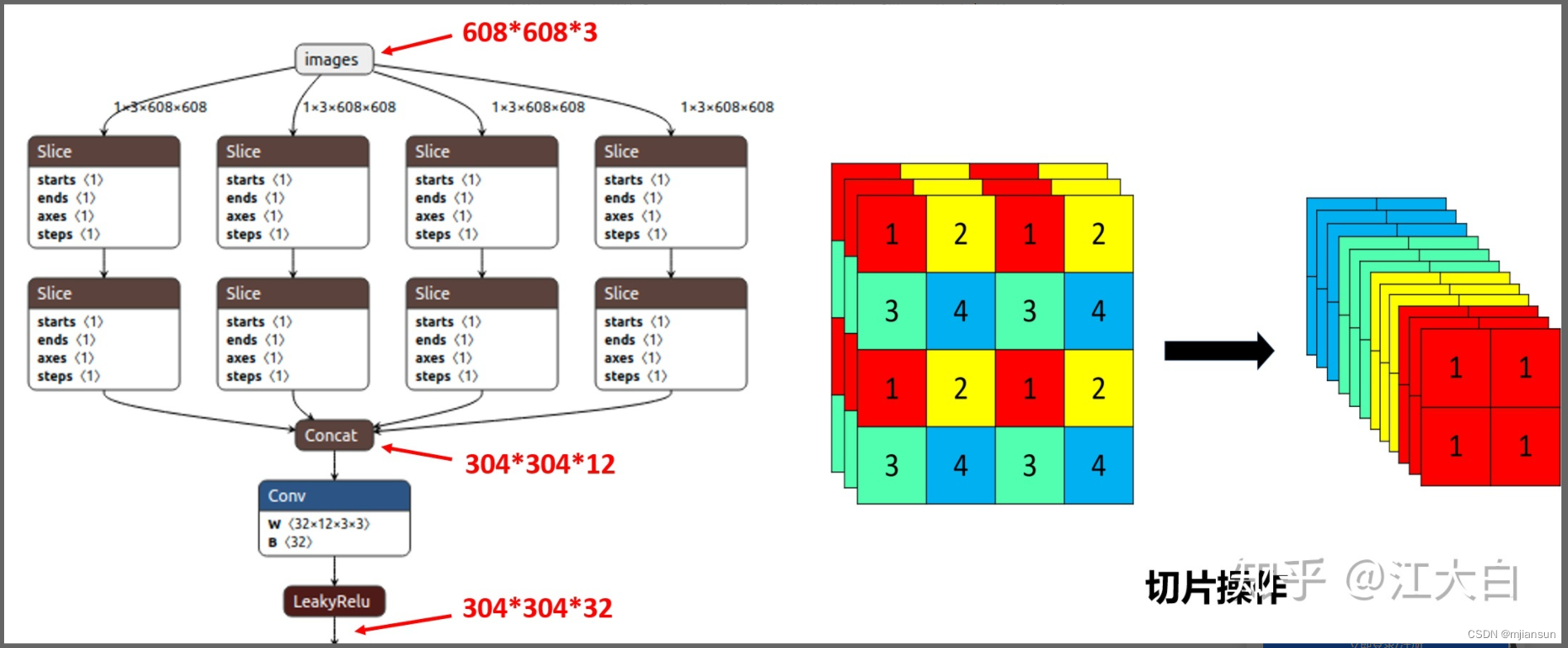
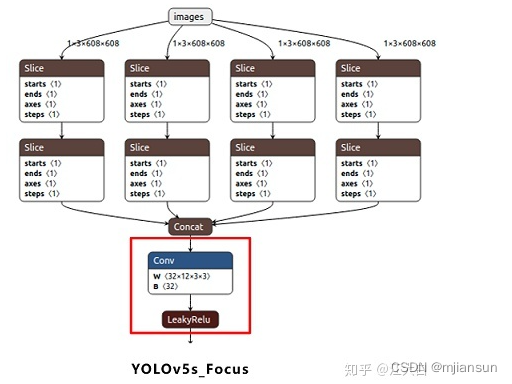
Focus结构,在Yolov3&Yolov4中并没有这个结构,其中比较关键是切片操作。
比如右图的切片示意图,443的图像切片后变成2212的特征图。
以Yolov5s的结构为例,原始6086083的图像输入Focus结构,采用切片操作,先变成30430412的特征图,再经过一次32个卷积核的卷积操作,最终变成30430432的特征图。
需要注意的是:Yolov5s的Focus结构最后使用了32个卷积核,而其他三种结构,使用的数量有所增加,先注意下,后面会讲解到四种结构的不同点。
(2)CSP结构
Yolov4网络结构中,借鉴了CSPNet的设计思路,在主干网络中设计了CSP结构。
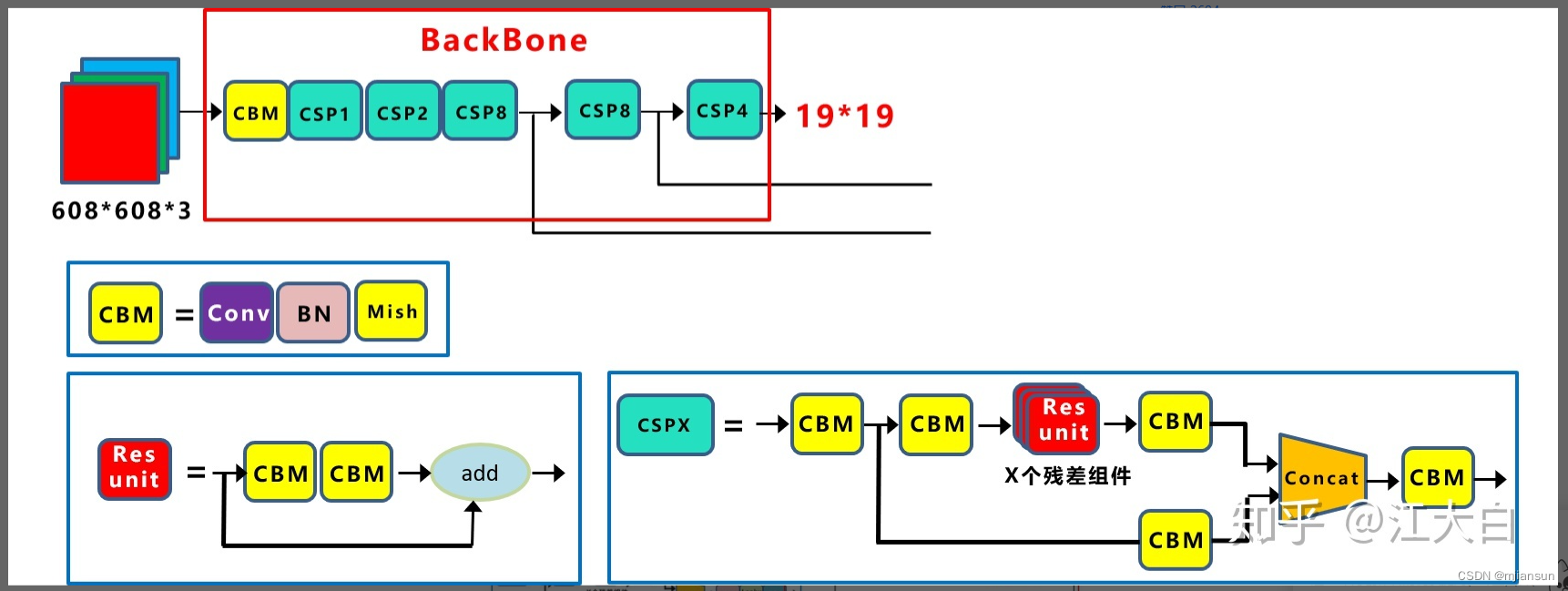
Yolov5与Yolov4不同点在于,Yolov4中只有主干网络使用了CSP结构。
而Yolov5中设计了两种CSP结构,以Yolov5s网络为例,CSP1_X结构应用于Backbone主干网络,另一种CSP2_X结构则应用于Neck中。
这里关于CSPNet的内容,也可以查看大白之前的《深入浅出Yolo系列之Yolov3&Yolov4核心基础完整讲解》。
Neck
Yolov5现在的Neck和Yolov4中一样,都采用FPN+PAN的结构,但在Yolov5刚出来时,只使用了FPN结构,后面才增加了PAN结构,此外网络中其他部分也进行了调整。
因此,大白在Yolov5刚提出时,画的很多结构图,又都重新进行了调整。
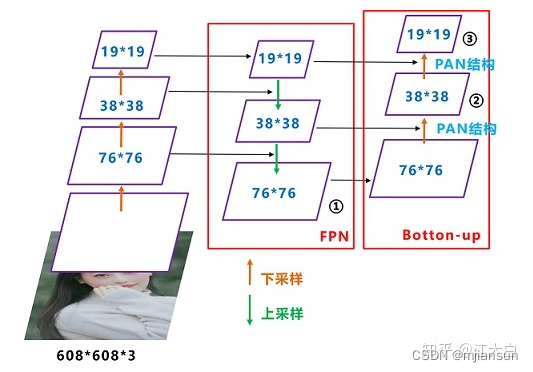
这里关于FPN+PAN的结构,大白在《深入浅出Yolo系列之Yolov3&Yolov4核心基础知识完整讲解》中,讲的很多,大家应该都有理解。
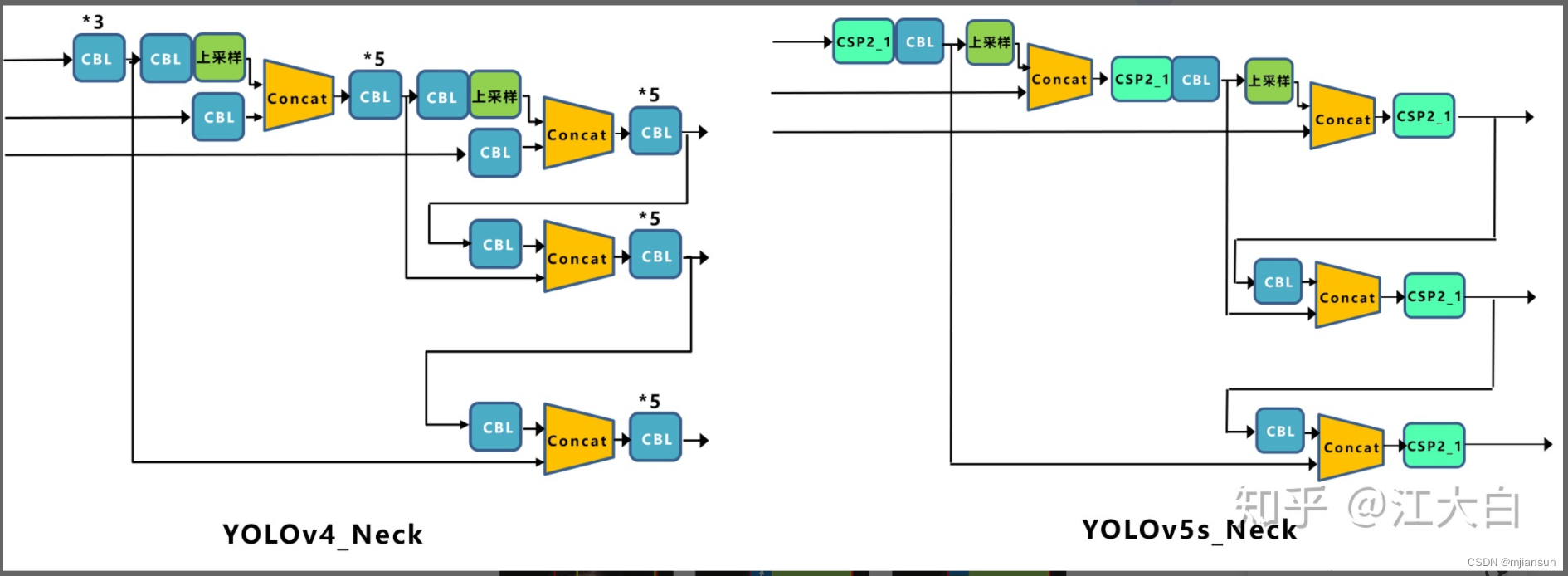
但如上面CSPNet结构中讲到,Yolov5和Yolov4的不同点在于,
Yolov4的Neck结构中,采用的都是普通的卷积操作。而Yolov5的Neck结构中,采用借鉴CSPnet设计的CSP2结构,加强网络特征融合的能力。
输出端
(1)Bounding box损失函数
在《深入浅出Yolo系列之Yolov3&Yolov4核心基础知识完整讲解》中,大白详细的讲解了IOU_Loss,以及进化版的GIOU_Loss,DIOU_Loss,以及CIOU_Loss。
Yolov5中采用其中的CIOU_Loss做Bounding box的损失函数。
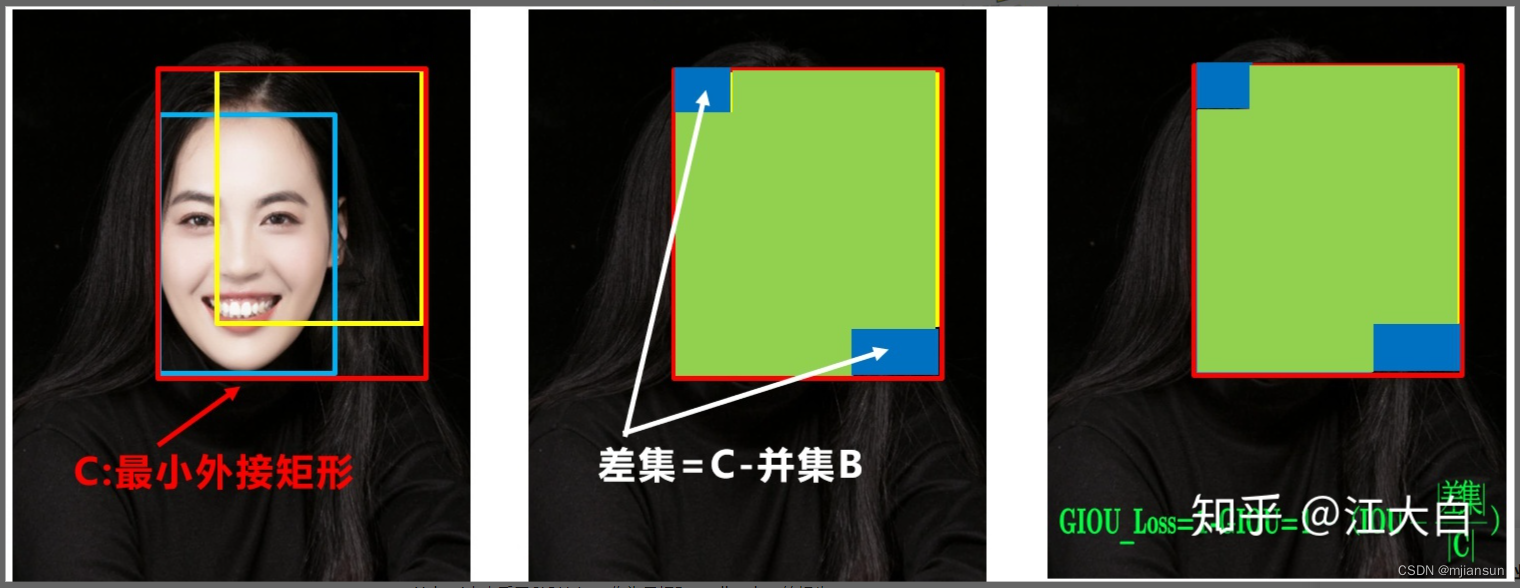
Yolov4中也采用CIOU_Loss作为目标Bounding box的损失。

(2)nms非极大值抑制
在目标检测的后处理过程中,针对很多目标框的筛选,通常需要nms操作。
因为CIOU_Loss中包含影响因子v,涉及groudtruth的信息,而测试推理时,是没有groundtruth的。
所以Yolov4在DIOU_Loss的基础上采用DIOU_nms的方式,而Yolov5中采用加权nms的方式。
可以看出,采用DIOU_nms,下方中间箭头的黄色部分,原本被遮挡的摩托车也可以检出。
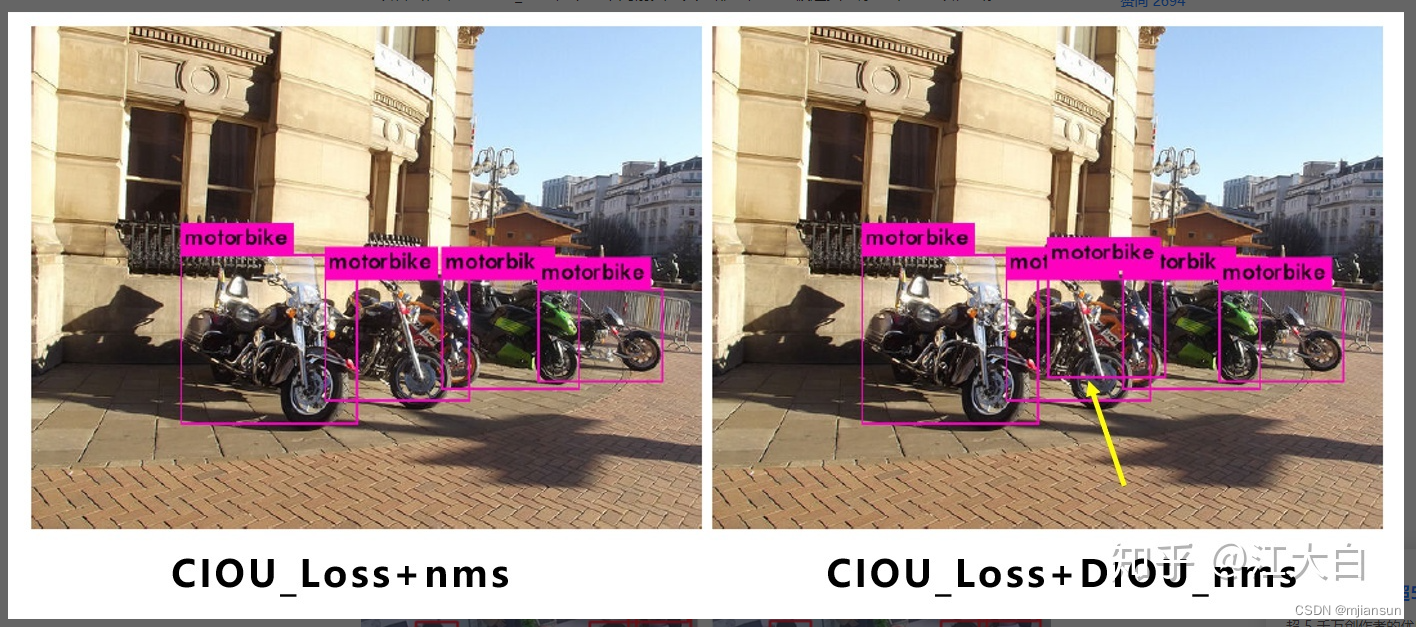
大白在项目中,也采用了DIOU_nms的方式,在同样的参数情况下,将nms中IOU修改成DIOU_nms。对于一些遮挡重叠的目标,确实会有一些改进。
比如下面黄色箭头部分,原本两个人重叠的部分,在参数和普通的IOU_nms一致的情况下,修改成DIOU_nms,可以将两个目标检出。
虽然大多数状态下效果差不多,但在不增加计算成本的情况下,有稍微的改进也是好的。

Yolov5四种网络结构的不同点
Yolov5代码中的四种网络,和之前的Yolov3,Yolov4中的cfg文件不同,都是以yaml的形式来呈现。
而且四个文件的内容基本上都是一样的,只有最上方的depth_multiple和width_multiple两个参数不同,很多同学看的一脸懵逼,不知道只通过两个参数是如何控制四种结构的?
四种结构的参数
大白先取出Yolov5代码中,每个网络结构的两个参数:
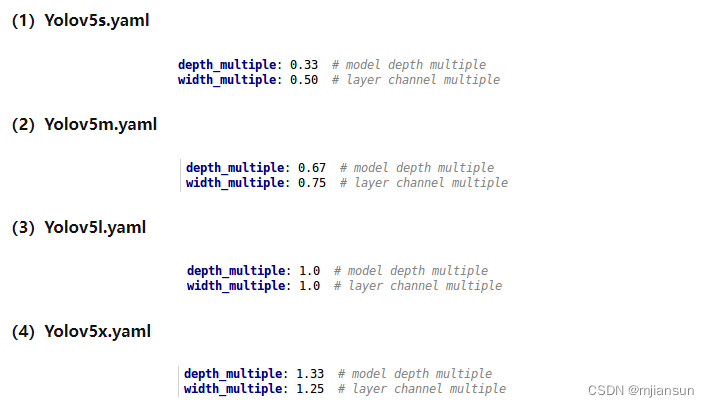
四种结构就是通过上面的两个参数,来进行控制网络的深度和宽度。其中depth_multiple控制网络的深度,width_multiple控制网络的宽度。
Yolov5网络结构
四种结构的yaml文件中,下方的网络架构代码都是一样的。
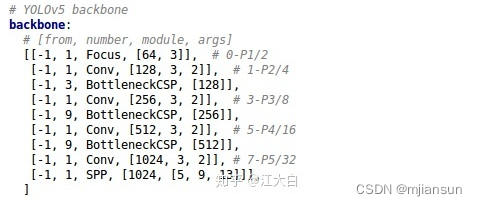
为了便于讲解,大白将其中的Backbone部分提取出来,讲解如何控制网络的宽度和深度,yaml文件中的Head部分也是同样的原理。
在对网络结构进行解析时,yolo.py中下方的这一行代码将四种结构的depth_multiple,width_multiple提取出,赋值给gd,gw。后面主要对这gd,gw这两个参数进行讲解。

下面再细致的剖析下,看是如何控制每种结构,深度和宽度的。
Yolov5四种网络的深度
(1)不同网络的深度
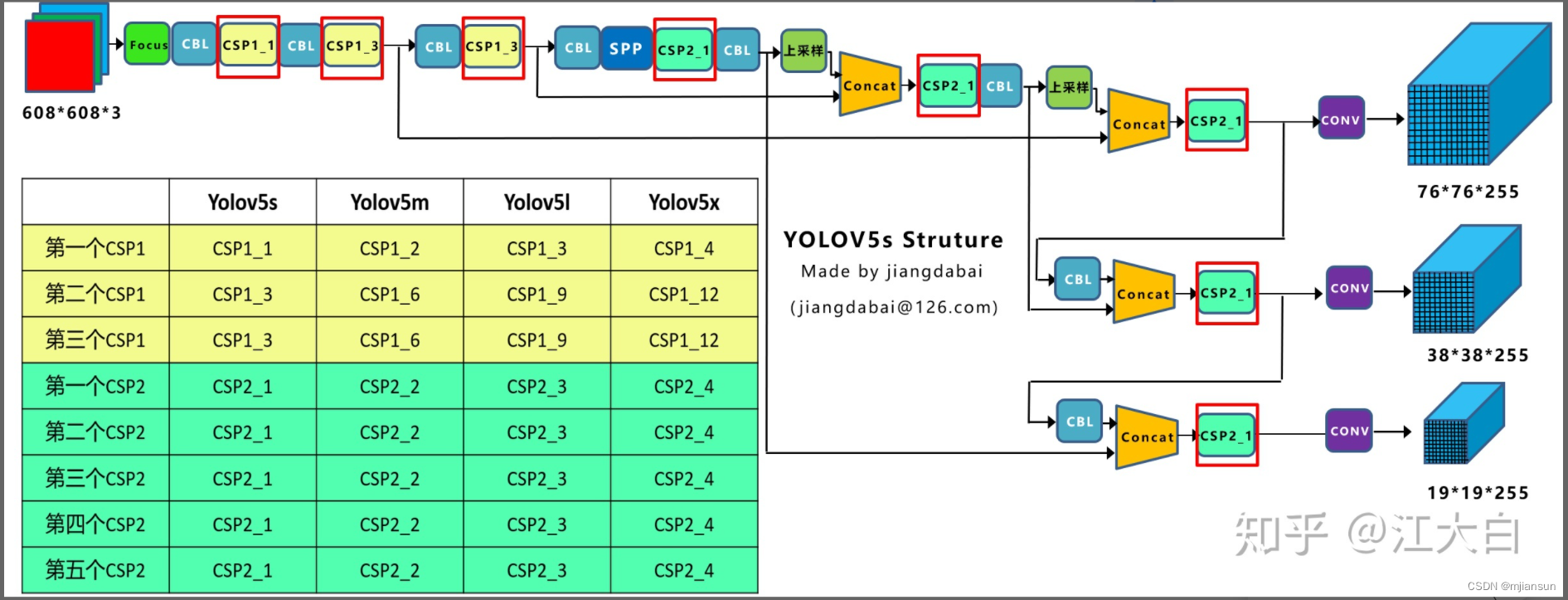
在上图中,大白画了两种CSP结构,CSP1和CSP2,其中CSP1结构主要应用于Backbone中,CSP2结构主要应用于Neck中。
需要注意的是,四种网络结构中每个CSP结构的深度都是不同的。
a.以yolov5s为例,第一个CSP1中,使用了1个残差组件,因此是CSP1_1。而在Yolov5m中,则增加了网络的深度,在第一个CSP1中,使用了2个残差组件,因此是CSP1_2。
而Yolov5l中,同样的位置,则使用了3个残差组件,Yolov5x中,使用了4个残差组件。
其余的第二个CSP1和第三个CSP1也是同样的原理。
b.在第二种CSP2结构中也是同样的方式,以第一个CSP2结构为例,Yolov5s组件中使用了2×X=2×1=2个卷积,因为X=1,所以使用了1组卷积,因此是CSP2_1。
而Yolov5m中使用了2组,Yolov5l中使用了3组,Yolov5x中使用了4组。
其他的四个CSP2结构,也是同理。
Yolov5中,网络的不断加深,也在不断增加网络特征提取和特征融合的能力。
(2)控制深度的代码
控制四种网络结构的核心代码是yolo.py中下面的代码,存在两个变量,n和gd。
我们再将n和gd带入计算,看每种网络的变化结果。

(3)验证控制深度的有效性
我们选择最小的yolov5s.yaml和中间的yolov5l.yaml两个网络结构,将**gd(depth_multiple)**系数带入,看是否正确。
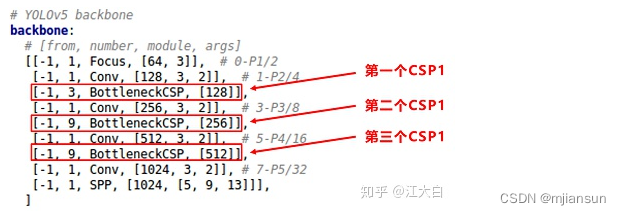
a. yolov5s.yaml
其中depth_multiple=0.33,即gd=0.33,而n则由上面红色框中的信息获得。
以上面网络框图中的第一个CSP1为例,即上面的第一个红色框。n等于第二个数值3。
而gd=0.33,带入(2)中的计算代码,结果n=1。因此第一个CSP1结构内只有1个残差组件,即CSP1_1。
第二个CSP1结构中,n等于第二个数值9,而gd=0.33,带入(2)中计算,结果n=3,因此第二个CSP1结构中有3个残差组件,即CSP1_3。
第三个CSP1结构也是同理,这里不多说。
b. yolov5l.xml
其中depth_multiple=1,即gd=1
和上面的计算方式相同,第一个CSP1结构中,n=3,带入代码中,结果n=3,因此为CSP1_3。
下面第二个CSP1和第三个CSP1结构都是同样的原理。
Yolov5四种网络的宽度
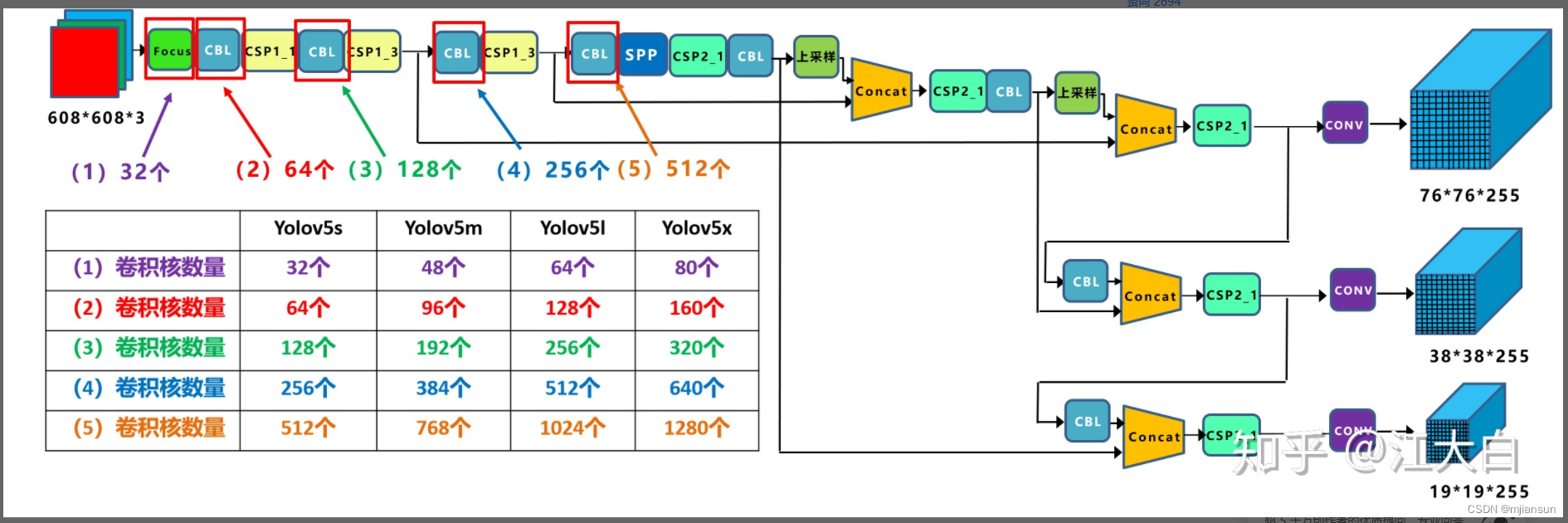
(1)不同网络的宽度:
如上图表格中所示,四种yolov5结构在不同阶段的卷积核的数量都是不一样的,因此也直接影响卷积后特征图的第三维度,即厚度,大白这里表示为网络的宽度。
a.以Yolov5s结构为例,第一个Focus结构中,最后卷积操作时,卷积核的数量是32个,因此经过Focus结构,特征图的大小变成304*304*32。
而yolov5m的Focus结构中的卷积操作使用了48个卷积核,因此Focus结构后的特征图变成304*304*48。yolov5l,yolov5x也是同样的原理。
b. 第二个卷积操作时,yolov5s使用了64个卷积核,因此得到的特征图是152*152*64。而yolov5m使用96个特征图,因此得到的特征图是152*152*96。yolov5l,yolov5x也是同理。
c. 后面三个卷积下采样操作也是同样的原理,这样大白不过多讲解。
四种不同结构的卷积核的数量不同,这也直接影响网络中,比如CSP1,CSP2等结构,以及各个普通卷积,卷积操作时的卷积核数量也同步在调整,影响整体网络的计算量。
大家最好可以将结构图和前面第一部分四个网络的特征图链接,对应查看,思路会更加清晰。
当然卷积核的数量越多,特征图的厚度,即宽度越宽,网络提取特征的学习能力也越强。
(2)控制宽度的代码
在yolov5的代码中,控制宽度的核心代码是yolo.py文件里面的这一行:

它所调用的子函数make_divisible的功能是:

(3)验证控制宽度的有效性
我们还是选择最小的yolov5s和中间的yolov5l两个网络结构,将width_multiple系数带入,看是否正确。

a. yolov5s.yaml
其中width_multiple=0.5,即gw=0.5。
以第一个卷积下采样为例,即Focus结构中下面的卷积操作。
按照上面Backbone的信息,我们知道Focus中,标准的c2=64,而gw=0.5,代入(2)中的计算公式,最后的结果=32。即Yolov5s的Focus结构中,卷积下采样操作的卷积核数量为32个。
再计算后面的第二个卷积下采样操作,标准c2的值=128,gw=0.5,代入(2)中公式,最后的结果=64,也是正确的。
b. yolov5l.yaml
其中width_multiple=1,即gw=1,而标准的c2=64,代入上面(2)的计算公式中,可以得到Yolov5l的Focus结构中,卷积下采样操作的卷积核的数量为64个,而第二个卷积下采样的卷积核数量是128个。
另外的三个卷积下采样操作,以及yolov5m,yolov5x结构也是同样的计算方式,大白这里不过多解释。
- 本文作者: 李宝璐
- 本文链接: https://libaolu312.github.io/2022/07/01/YOLOv5/
- 版权声明: 本博客所有文章除特别声明外,均采用 MIT 许可协议。转载请注明出处!