

Diffusion Models扩散模型与深度学习(数学原理深解)
前面的三次博客已经深入的说明了配分函数、基于能量模型、受限玻尔兹曼机、蒙特卡洛采样法和重要采样法等数学原理,这些都是扩散模型所蕴含的底层数学原理,那么现在就开始真正理解一下扩散模型。
核心问题
机器学习的一个核心问题是,使用高度灵活的概率分布族对复杂数据集进行建模,在这些概率分布族中,学习、抽样、推理和评估仍然可以通过分析或计算进行处理。
扩散模型的基本思想受到非平衡统计物理的启发,通过迭代正向扩散过程系统地、缓慢地破坏数据分布中的结构,然后学习一个反向扩散过程,恢复数据中的结构,产生了一个高度灵活和易于处理的数据生成模型。
这种方法允许我们快速学习、采样和评估数千层或时间步长的深度生成模型中的概率,以及计算学习模型下的条件概率和后验概率。
说明:扩散模型是一种很古老的模型,2020年提出的Denoising Diffusion Probabilistic Models(DDPM)去噪扩散概率取得了更好的效果,与此类似,或者在DDPM上改进的模型如:Score-Based Models、DDIM、SMLD等,原理相似。这里就以DDPM为例讲述其数学原理。
总体过程
总体过程分为正向过程和逆向过程。
扩散概率模型DDPM是一个参数化的马尔科夫链,使用变分推理来来生成有限时间 T 后与数据分配的样本。神经网络学习这条链的跃迁来逆转扩散过程,这是一条马尔科夫链,它在采样的相反方向逐渐向数据添加噪声,直到信号被破坏。
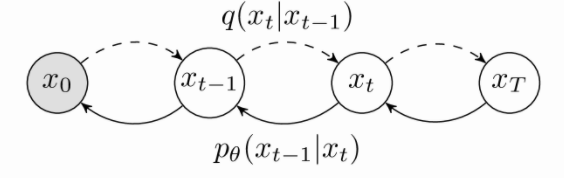
正向过程称为 q采样过程,用\(q\left( x_t|x_{t-1} \right)\)表示,这一过程可以理解为添加噪声的过程,不涉及参数分布;
逆向过程称为 p采样过程,用\(p_{\theta}\left( x_{t-1}|x_t \right)\)表示,这一过程是从噪声中重建出数据分布的过程。
前向过程(Diffusion Process)
要从给定一个从真实数据分布 X0 ~ q(x)中抽样的数据点,前向过程在 0~T 时间步长内逐步添加噪声,产生一系列有噪声的样本:\(x_1,...,x_T\)
扩散模型与其他类型的潜在变量模型的区别在于近似后验\(q\left( x_{1:T}|x_0 \right)\)是一个固定的马尔科夫链,因此可以写成: \[ q\left( x_{1:T}|x_0 \right) :=\prod_{t=1}^T{q\left( x_t|x_{t-1} \right)} \] 添加高斯噪声的数据通过variance schedule \(\beta _1,...,\beta _T\)控制,由于前向过程是固定的马尔科夫链,因此variance schedule \(\beta _t\)也是固定的,实际代码中可以通过一个固定的variance schedule表来获取。从全局考虑,越接近数据分布添加的噪声对数据分布的影响越大,反之越小。所以后来人用 cos 函数、指数函数 等方法获取\(\beta _t\),取得了更好的效果。但是需要保证\(\beta _t\)足够小这一假设,因为只有\(\beta _t\)足够小,逆向过程的\(p_{\theta}\left( x_{t-1}|x_t \right)\)才是符合高斯分布的,这是我们推导的一个重要前提。
因此\(q\left( x_t|x_{t-1} \right)\)可以定义为: \[ q\left( x_t|x_{t-1} \right) :=N\left( x_t;\sqrt{1-\beta _t}x_{t-1},\beta _tI \right) \] 推导过程如下:
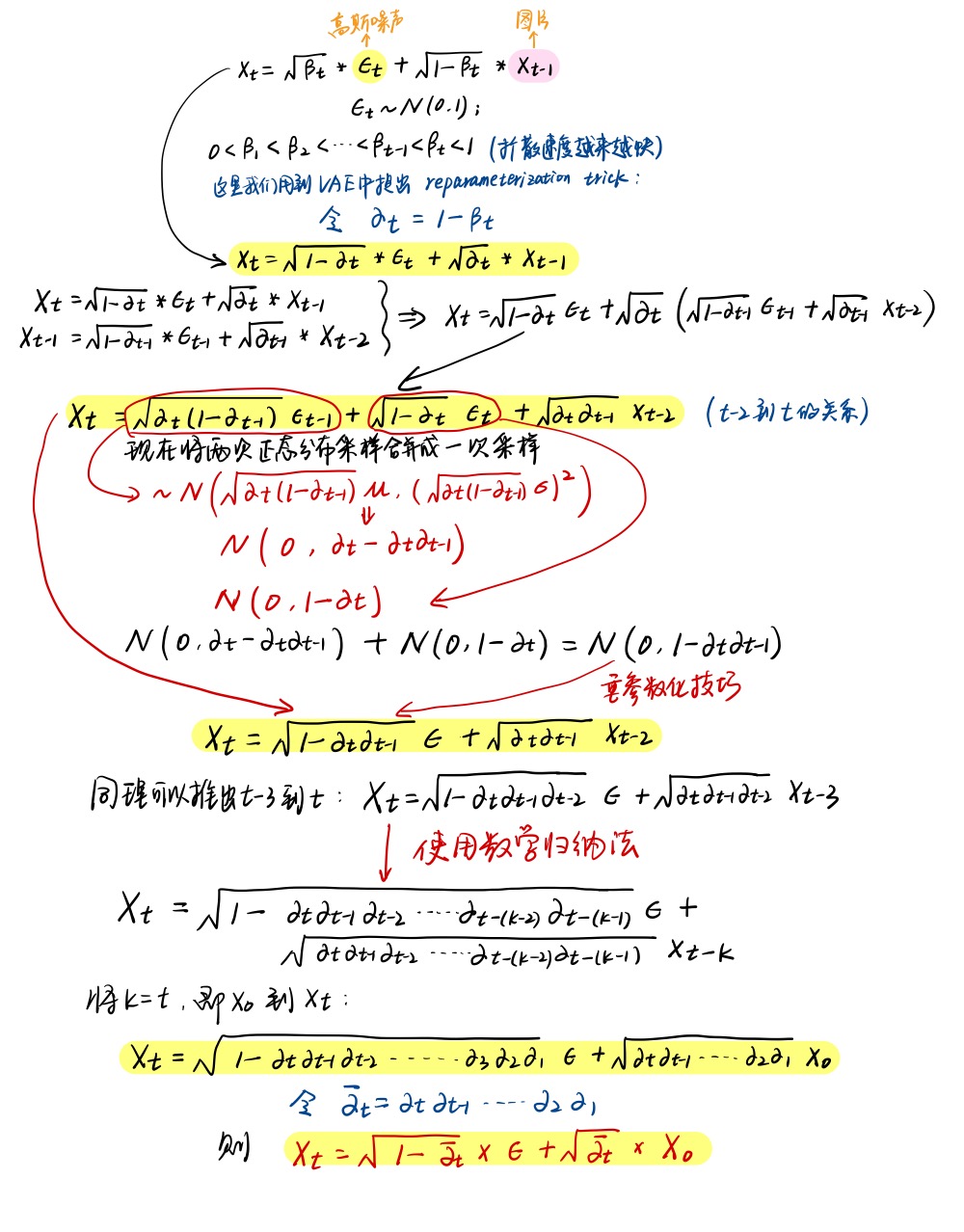
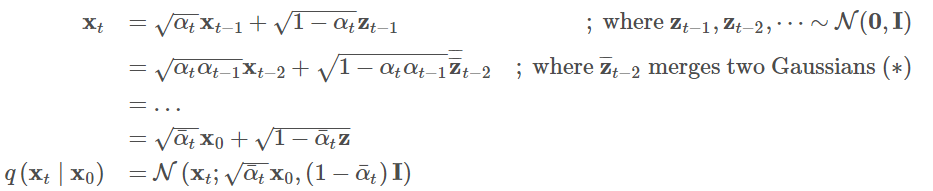
推导过程中使用VAE中提出的reparameterization trick,为了方便表示q采样累成过程,定义:
- \(\alpha _t=1-\beta _t\)
- \(\bar{\alpha}_t=\prod_{i=1}^T{\alpha _i}\)
可得 \(x_t\):
reparameterization trick是VAE中的知识点:损失函数中的期望项从z ~ \(q_{\phi}\left( z|x \right)\)中生成样本,抽样是一个随机过程,因此我们不能反向传播梯度。为了使其可训练,引入了reparameterization trick重参数化技巧:通常可以将随机变量z表示为确定性变量\(z=T_{\phi}\left( x,\epsilon \right)\),其中\(\epsilon\)是辅助独立随机变量,变换函数\(T_{\phi}\)通过\(\phi\)参数化将\(\epsilon\)转换为\(z\)。
例如:

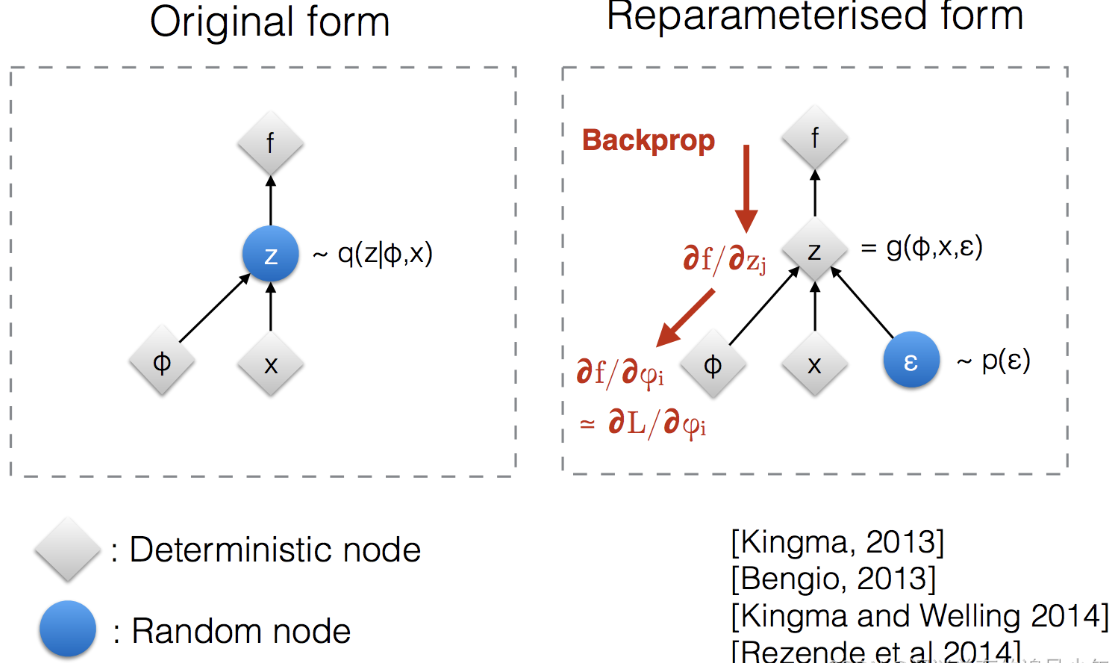
注:图例说明重参数化技巧如何使抽样过程可训练
这里再详细补充一些吧。
Reparameterization trick(重参数化技巧)是一种在训练生成模型中处理随机性潜在变量的方法,特别常见于变分自动编码器(VAE)等模型中。这个技巧的目的是使模型可微分(differentiable),以便使用梯度下降等反向传播算法来训练模型,也就是将随机采样的过程转换为可导的运算,从而使得梯度下降算法可以正常工作。
以下是它的基本原理和操作:
- 1.背景:在生成模型中,通常会有一个随机性的潜在变量,例如高斯分布中的均值和方差,用于生成样本。这会导致问题,因为采样操作是不可微的,无法通过反向传播来更新梯度,从而让模型学习这些分布参数。
- 2.重参数化:为了解决这个问题,Reparameterization trick 提出将随机采样操作从网络中移动到一个确定性函数中。这个确定性函数通常是一个线性变换,将从标准高斯分布(均值为0,方差为1)中采样的随机噪声与潜在变量的均值和标准差相结合。这个确定性函数是可微分的,因此梯度可以在这个过程中传播。
- 3.具体操作:在实际操作中,首先从标准高斯分布中采样一个随机噪声向量(通常记作𝝐)。然后,通过一个神经网络或其他可微分的映射函数,将这个随机噪声向量与模型的均值和标准差参数相结合,生成最终的潜在变量。这个潜在变量被用于生成样本,同时也与损失函数相关联,使得可以通过反向传播来更新梯度。
举个栗子:
Variational Bipartite Graph Encoder中作者有这样一个操作:
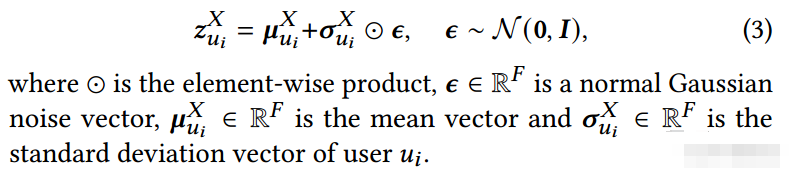
上面(3)式子,和VAE的讲解结合起来看看,貌似能理解了。首先 Z 服从 N(μ,σ2)的话,大学概率论都学过,那么\(ε = σ \frac{(Z-μ)}{σ}\)就服从标准正态分布了,也就是 ε 服从标准正态分布N(0, 1)。 \(ε = σ \frac{(Z-μ)}{σ}\)左边的等式变式一下,就有Z = μ + ε × σ了,那么从 N(μ,σ2)采样一个Z,相当于从从标准正态分布N(0, 1)采样一个 ε 。这样就将随机采样的过程转换为可导的运算,可以进行反向传播了。
总之,“Reparameterization trick” 允许模型在训练过程中通过随机采样得到的潜在变量,同时保持了可微性,从而使生成模型更容易优化。这个技巧在生成对抗网络(GANs)、变分自动编码器(VAE)和其他生成模型中广泛应用。
采样过程(Reverse Diffusion Process)
如果我们能逆转上述前向过程,从\(q\left( x_{t-1}|x_t \right)\)当中采样,我们就能从\(x_T\)得到\(x_0\)。我们前面说明\(\beta _t\)足够小假设的时候说明了\(q\left( x_{t-1}|x_t \right)\)也是符合高斯分布的。但是我们很难得到整个数据集的\(q\left( x_{t-1}|x_t \right)\)概率分布,因此我们需要学习一个模型\(p_{\theta}\)来近似这些条件概率以便进行反向扩散过程: \[ p_{\theta}\left( x_0:T \right) =p\left( x_T \right) \prod_{t=1}^T{p_{\theta}\left( x_{t-1}|x_t \right) \ \ p_{\theta}\left( x_{t-1}|x_t \right) =N\left( x_{t-1};\mu _{\theta}\left( x_t,t \right) ,\sum_{\theta}{\left( x_t,t \right)} \right)} \] 我们还是手写一遍推导过程:
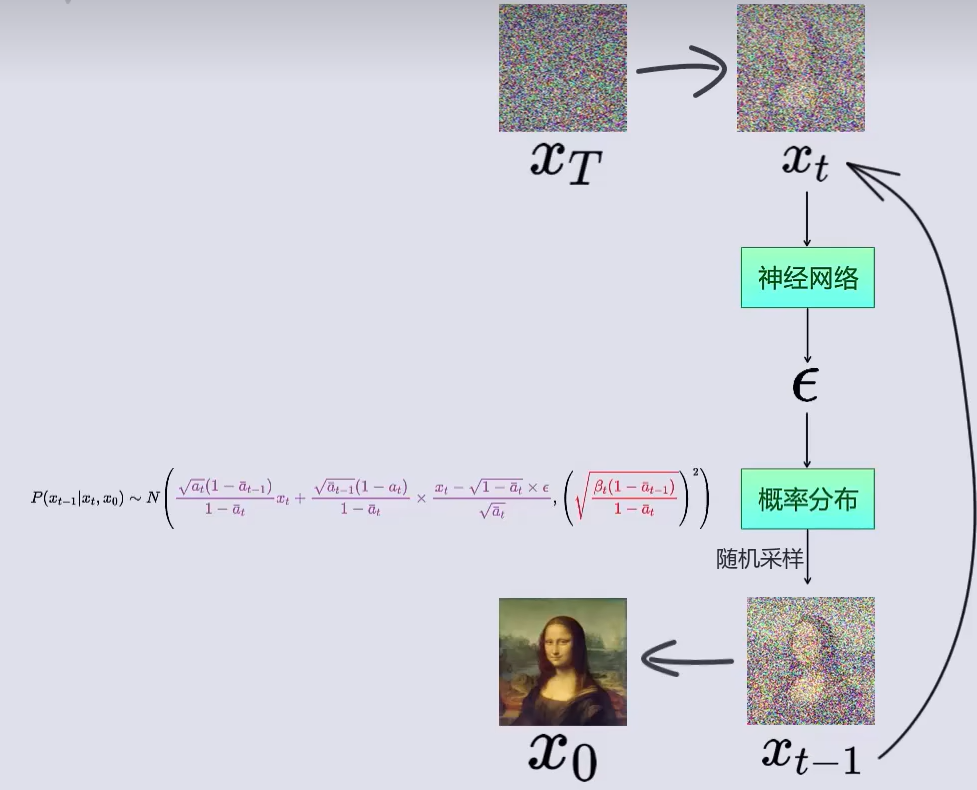
其中反向过程的示意图可以这样画:
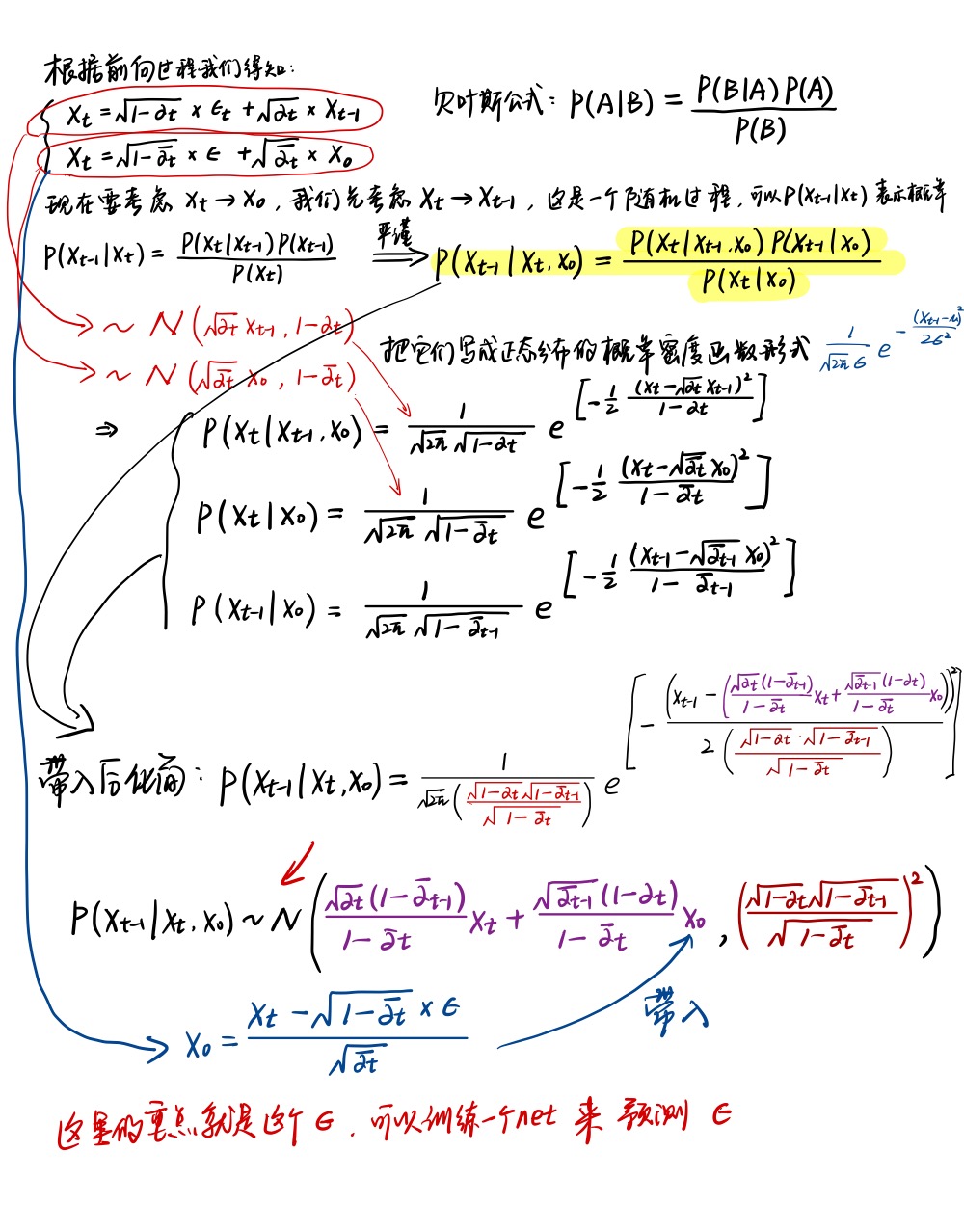
为了简化后面的推导,我们可以这样写: \[ p\left( x_{t-1}|x_t,x_0 \right) \ ~\ N\left( x_{t-1};\tilde{\mu}_t\left( x_t,x_0 \right) ,\tilde{\beta}_tI \right) \] \[ where\ \tilde{\mu}_t\left( x_t,x_0 \right) =\frac{\sqrt{\alpha _t\left( 1-\bar{\alpha}_{t-1} \right)}}{1-\bar{\alpha}_t}x_t+\frac{\sqrt{\bar{\alpha}_{t-1}}\beta _t}{1-\bar{\alpha}_t}\frac{1}{\sqrt{\bar{\alpha}_t}}\left( x_t-\sqrt{1-\bar{\alpha}_t}z\epsilon \right) \] \[ =\frac{1}{\sqrt{\alpha _t}}\left( x_t-\frac{\beta _t}{\sqrt{1-\bar{\alpha}_t}}\epsilon \right) \] \[ and\ \ \ \bar{\beta}_t:=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t}\beta _t \]
推导训练目标
引入变分分布 q 后可以写出关于似然函数\(p_{\theta}\)的变分界限: \[ -\log p_{\theta}\left( x_0 \right) \le -\log p_{\theta}\left( x_0 \right) \ +\ D_{KL}\left( q\left( x_{1:T}|x_0 \right) ||p_{\theta}\left( x_{1:T}|x_0 \right) \right) \] \[ =-\log p_{\theta}\left( x_0 \right) +\mathbb{E}_{x_1:T~q\left( x_1:T|x_0 \right)}\left[ \log \frac{q\left( x_{1:T}|x_0 \right)}{p_{\theta}\left( x_{0:T} \right) /p_{\theta}\left( x_0 \right)} \right] \] \[ =-\log p_{\theta}\left( x_0 \right) +\mathbb{E}_q\left[ \log \frac{q\left( x_{1:T}|x_0 \right)}{p_{\theta}\left( x_{0:T} \right)}+\log p_{\theta}\left( x_0 \right) \right] \] \[ =\mathbb{E}_q\left[ \log \frac{q\left( x_{1:T}|x_0 \right)}{p_{\theta}\left( x_{0:T} \right)} \right] \] 所以: \[ L_{VLB}=\mathbb{E}_{q\left( x_{0TT} \right)}\left[ \log \frac{q\left( x_{1:T}|x_0 \right)}{p_{\theta}\left( x_{0:T} \right)} \right] \ge -\mathbb{E}_{q\left( x_0 \right)}\log p_{\theta}\left( x_0 \right) \] 这里有些部分可能看不懂,做一些额外的解释:
- \(D_{KL}\)这里指的是KL散度,这是一个用来衡量两个概率分布的相似性的一个度量指标。
- 信息熵为:\(H=-\sum_{i=1}^N{p\left( x_i \right) \log p\left( x_i \right)}\)
- 在信息熵的基础上,我们定义 KL 散度为:\(D_{KL}\left( p||q \right) =\sum_{i=1}^N{p\left( x_i \right) \cdot \left( \log \frac{p\left( x_i \right)}{q\left( x_i \right)} \right)}\)
- \(D_{KL}\left( p||q \right)\)表示的就是概率 q 与概率 p 之间的差异,很显然,散度越小,说明 概率 q 与概率 p 之间越接近,那么估计的概率分布于真实的概率分布也就越接近。
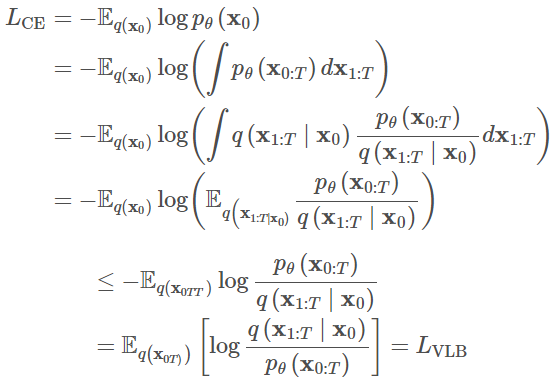
使用Jenson不等式也可以直接得到相同的结果,假设我们想要最小化交叉熵最为学习目标:
为了将方程中的每一项转化为可解析计算,目标可以进一步改写为几个KL散度和熵项的组合,通过随机梯度下降优化L的随机项:
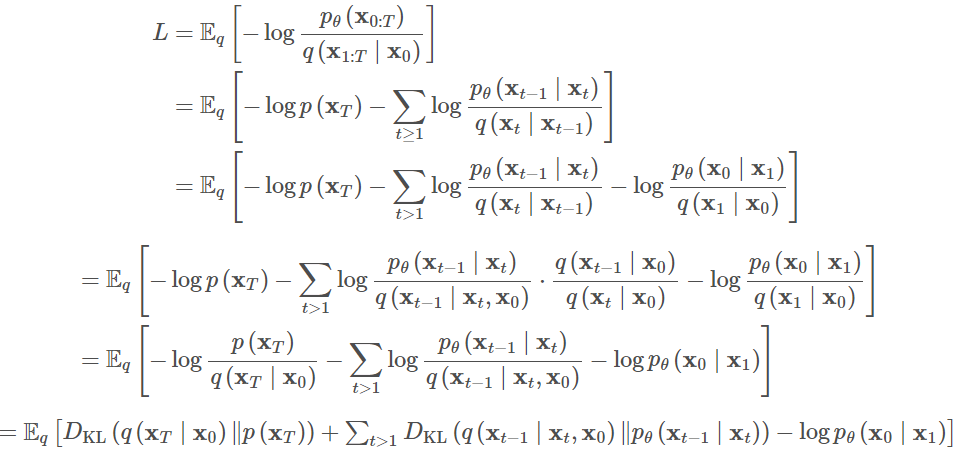
所以随机梯度下降的目标为:

因为XT,X0,X1的分布都是确定的,所以LT、L0都是常数,求导后可以省略,所以L可再简化为只含有Lt-1的想,为了表达方便我们写成Lt: \[ L_t=\mathbb{E}_{x_0,z}\left[ \frac{1}{2||\sum_{\theta}{\left( x_t,t \right) ||\begin{array}{c} 2\\ 2\\ \end{array}}}||\tilde{\mu}_t\left( x_t,x_0 \right) -\mu _{\theta}\left( x_t,t \right) ||\begin{array}{c} 2\\ \\ \\ \end{array} \right] \] \[ =\mathbb{E}_{x_0,z}\left[ \frac{1}{2||\sum_{\theta}{||\begin{array}{c} 2\\ 2\\ \end{array}}}||\frac{1}{\sqrt{\alpha _t}}\left( x_t-\frac{\beta _t}{\sqrt{1-\bar{\alpha}_t}}\epsilon \right) -\frac{1}{\sqrt{\alpha _t}}\left( x_t-\frac{\beta _t}{\sqrt{1-\bar{\alpha}_t}}\epsilon _{\theta}\left( x_t,t \right) ||\begin{array}{c} 2\\ \\ \\ \end{array} \right) \right] \] \[ =\mathbb{E}_{x_0,z}\left[ \frac{\beta _{t}^{2}}{2\alpha _t\left( 1-\bar{\alpha}_t \right) ||\sum_{\theta}{\,\,||\begin{array}{c} 2\\ 2\\ \end{array}}}||\epsilon -\epsilon _{\theta}\left( x_t,t \right) ||\begin{array}{c} 2\\ \\ \text{}\\ \end{array} \right] \] \[ =\mathbb{E}_{x_0,z}\left[ \frac{\beta _{t}^{2}}{2\alpha _t\left( 1-\bar{\alpha}_t \right) ||\sum_{\theta}{\,\,||\begin{array}{c} 2\\ 2\\ \end{array}}}||\epsilon _t-\epsilon _{\theta}\left( \sqrt{\bar{\alpha}_t}x_0+\sqrt{1-\bar{\alpha}_t}\epsilon ,t \right) ||\begin{array}{c} 2\\ \\ \text{}\\ \end{array} \right] \] \[ L_t=\mathbb{E}_{x_0,z}\left[ \frac{1}{2||\sum_{\theta}{\left( x_t,t \right) ||\begin{array}{c} 2\\ 2\\ \end{array}}}||\tilde{\mu}_t\left( x_t,x_0 \right) -\mu _{\theta}\left( x_t,t \right) ||\begin{array}{c} 2\\ \\ \\ \end{array} \right] \] \[ =\mathbb{E}_{x_0,z}\left[ \frac{1}{2||\sum_{\theta}{||\begin{array}{c} 2\\ 2\\ \end{array}}}||\frac{1}{\sqrt{\alpha _t}}\left( x_t-\frac{\beta _t}{\sqrt{1-\bar{\alpha}_t}}\epsilon \right) -\frac{1}{\sqrt{\alpha _t}}\left( x_t-\frac{\beta _t}{\sqrt{1-\bar{\alpha}_t}}\epsilon _{\theta}\left( x_t,t \right) ||\begin{array}{c} 2\\ \\ \\ \end{array} \right) \right] \] \[ =\mathbb{E}_{x_0,z}\left[ \frac{\beta _{t}^{2}}{2\alpha _t\left( 1-\bar{\alpha}_t \right) ||\sum_{\theta}{\,\,||\begin{array}{c} 2\\ 2\\ \end{array}}}||\epsilon -\epsilon _{\theta}\left( x_t,t \right) ||\begin{array}{c} 2\\ \\ \\ \end{array} \right] \] \[ =\mathbb{E}_{x_0,z}\left[ \frac{\beta _{t}^{2}}{2\alpha _t\left( 1-\bar{\alpha}_t \right) ||\sum_{\theta}{\,\,||\begin{array}{c} 2\\ 2\\ \end{array}}}||\epsilon _t-\epsilon _{\theta}\left( \sqrt{\bar{\alpha}_t}x_0+\sqrt{1-\bar{\alpha}_t}\epsilon ,t \right) ||\begin{array}{c} 2\\ \\ \\ \end{array} \right] \]
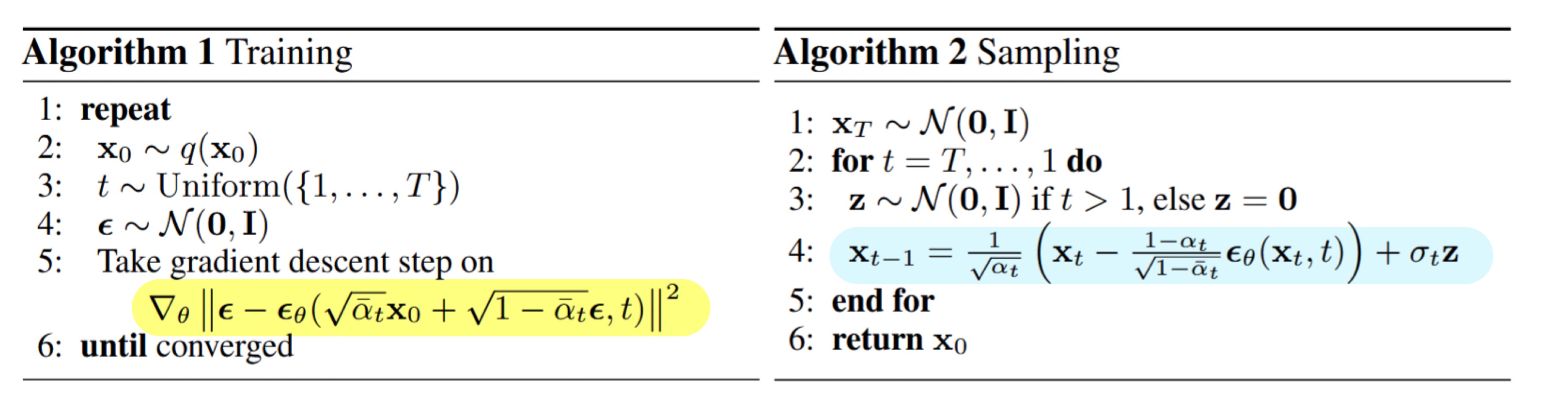
训练扩散模型时,忽略加权项的简化目标效果更好: \[ L_{t}^{simple}=\mathbb{E}_{x_{0,z_t}}\left[ ||\epsilon -\epsilon _{\theta}\left( \sqrt{\bar{\alpha}_{\theta}x_0}+\sqrt{1-\bar{\alpha}_t}\epsilon ,t \right) ||\begin{array}{c} 2\\ \\ \text{ }\\ \end{array} \right] \] 其中\(z_\theta\)可以理解为使用神经网络对噪声预测,此处的噪声可以看成是数据分布的增广,此处的神经网络一般用Unet,至于为什么要用Unet,我会再写一篇博客。
至此,我们正式推出了完整训练目标,也就得到了原论文中的训练伪代码:
- 本文作者: 李宝璐
- 本文链接: https://libaolu312.github.io/2023/11/08/Diffusion-Models扩散模型与深度学习-数学原理和代码解读/
- 版权声明: 本博客所有文章除特别声明外,均采用 MIT 许可协议。转载请注明出处!